This is going to be a pretty short post as I don’t have much content for this bot.
Orion was a project I tackled in undergrad. I wanted to build a mobile base that could be used for experimentation (and I wanted it to be sturdy). Plus I had access to a makerspace that I wanted to try out / prove myself at.
Github for this project is here. Note this project was not nor will it ever be complete. I don’t even have the robot anymore (hopefully the underclassmen have made use of it).
Version One
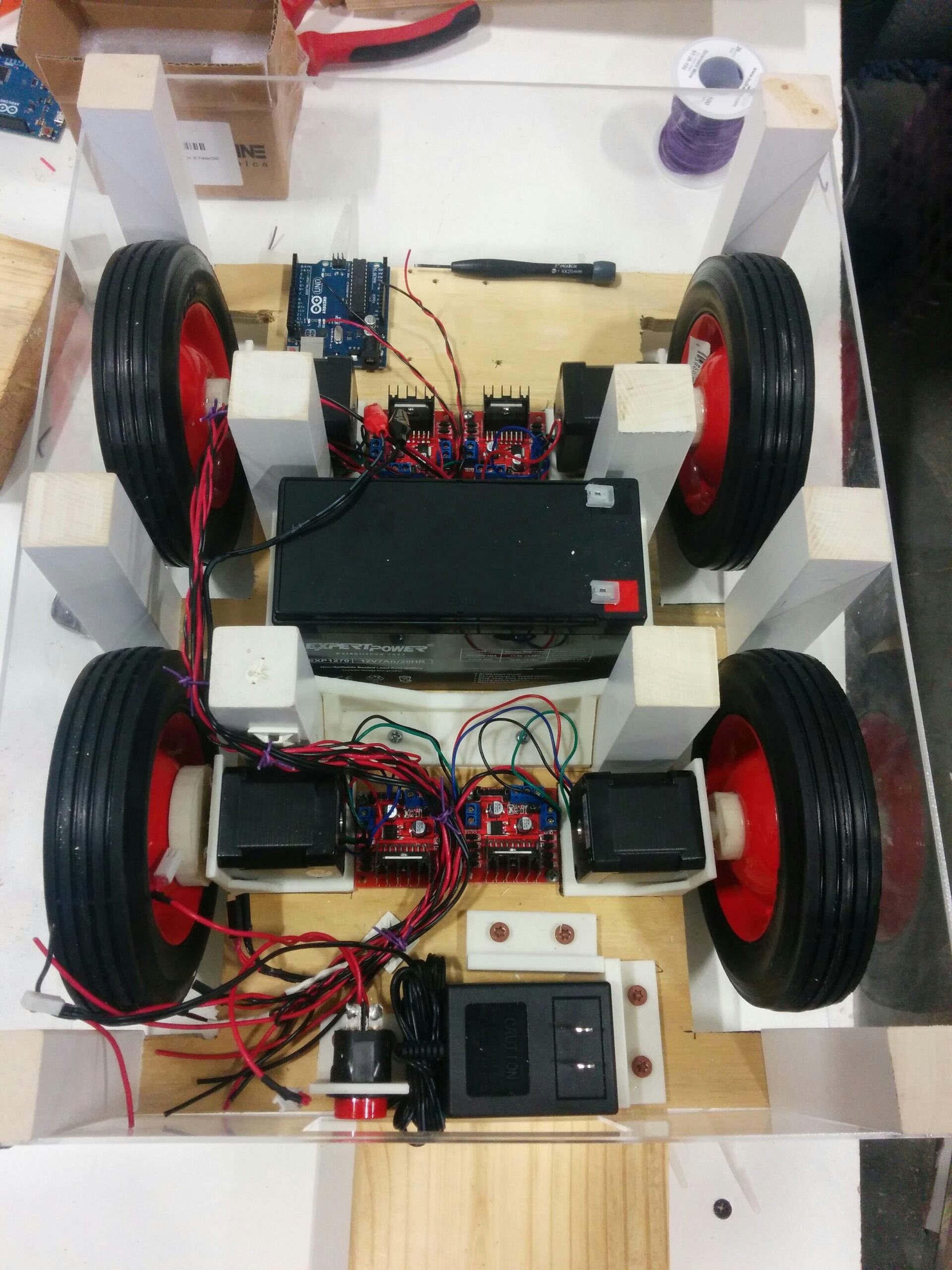
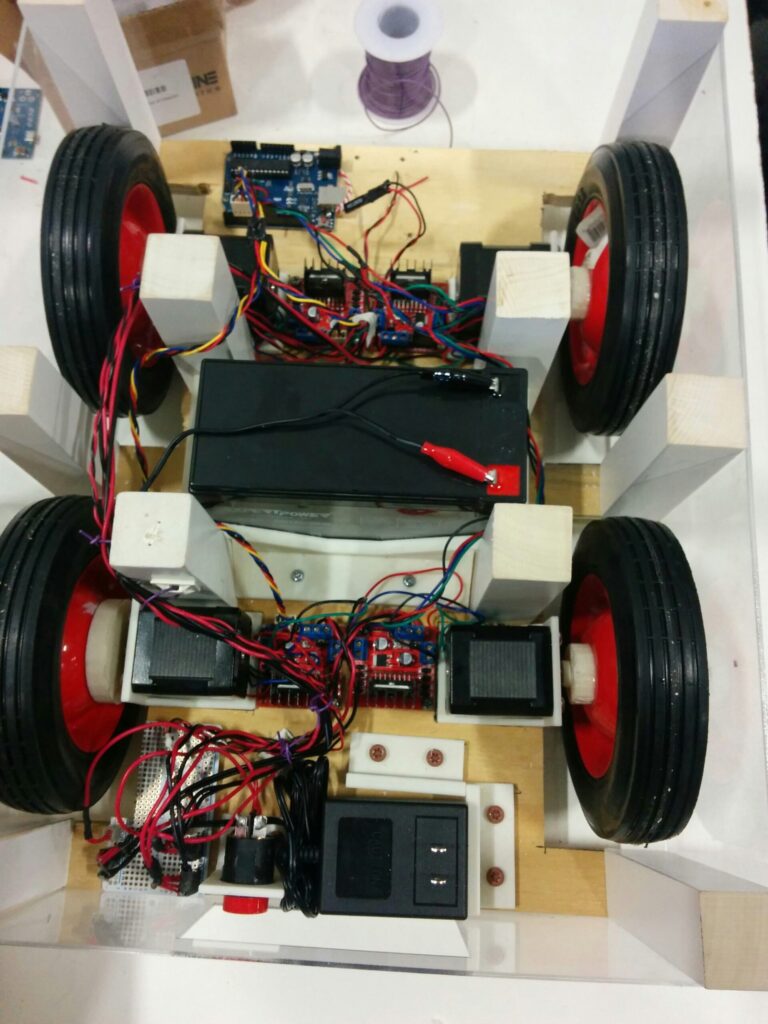
Orion V1 consisted of a chassis made of plywood / wood stock, and various small 3D printed parts.
Drivetrain was direct drive with four stepper motors (which was not the right call). Each stepper motor was with an off-the-shelf motor controller wired through to an Arduino. Power was supplied via a 12V SLA battery.
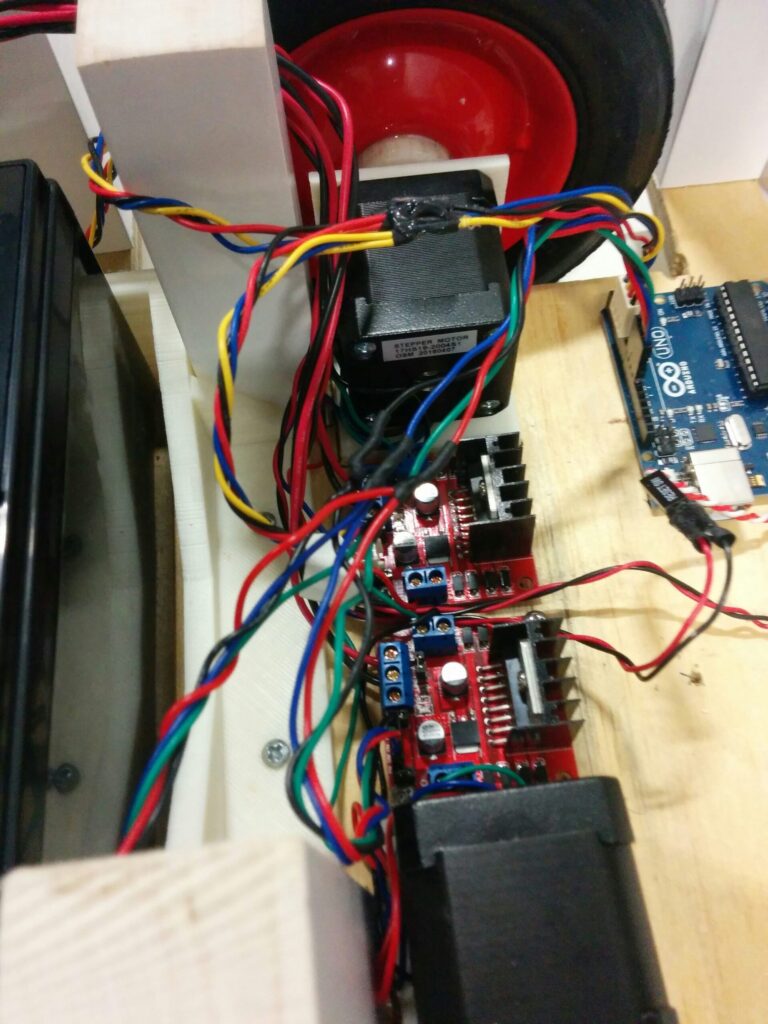

The main learning was from access to the 3D printer and the various small parts I had to CAD up. These included:
- Shaft adapters for mounting the wheels to the Stepper motors
- Right-angle brackets for stepper motors
- Battery box for SLA
- Right-angle brackets to hold the SLA battery charger
- Right-angle bracket to hold the e-stop button
The main issue with this robot was the stepper motors got REALLY hot. It was a mistake to direct drive such a heavy robot with stepper motors. I attempted to address this in version two.
Version Two
To address the stepper motor heating issue, I decided to switch them out for some VEX motors and motor controllers available. I spent way too much time iterating and gluing the 3D mounting brackets to handle the torque of these motors. The drivetrain was now two motor instead of four, with each side having a direct drive wheel and a belt driven wheel.
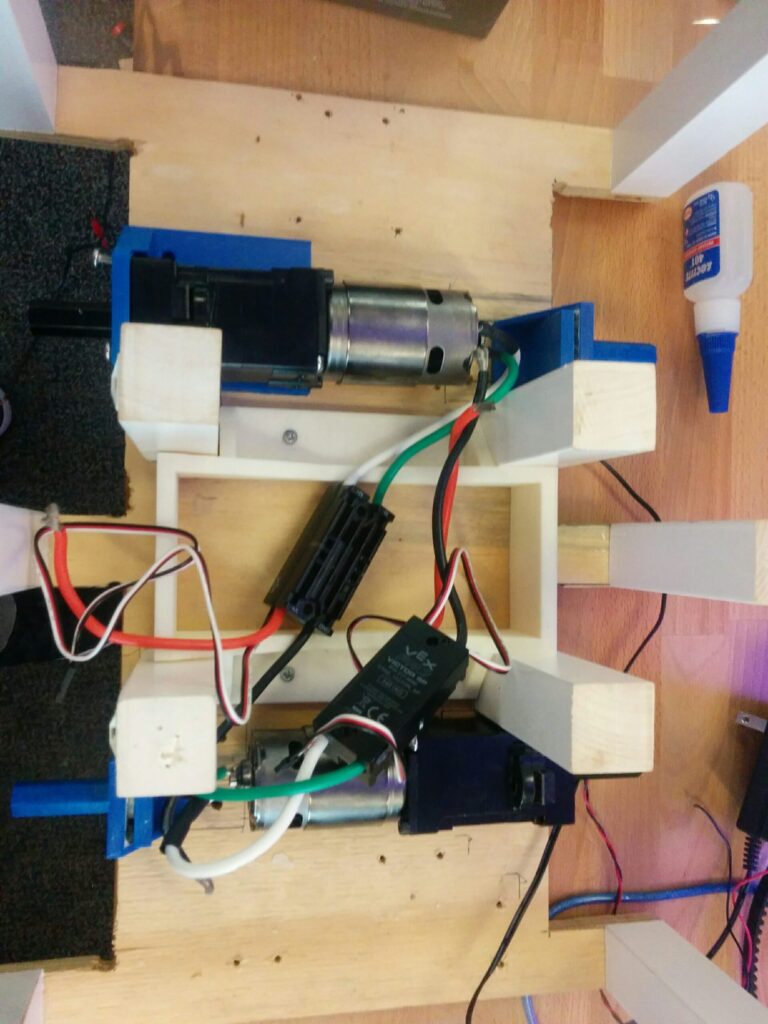
I was able to get this robot up to a drivable state (not that I ever documented it with a picture).
During this redesign, I switched out the controller from an Arduino Uno to an ESP8266 (favorite microcontroller at the moment). I wrote a simple website that acts as a virtual joystick feeding back control messages over a websocket to steer the robot.
Code can be found on Github here.
Final Thoughts
Building robots is a creative exercise and sometimes (or in my case, always) have some issues to work out. I spent way too much time learning lessons that looking back were obvious. But that is part of the journey to getting an understanding of what works and why.
Plus, I got to design some 3D printed parts and further developed my embedded system acumen. So win-win in my book.
I just wish I did a better job of documenting these formative projects back when I built them instead of nearly ten years later.